

What’s New
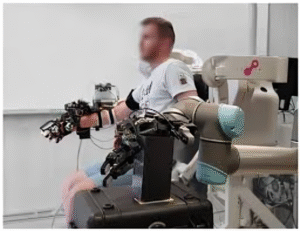
Ozdamar and colleagues introduce a groundbreaking telemanipulation framework that enables a human operator to control multiple robotic arms with varying levels of shared autonomy. By combining EMG muscle signals with Xsens motion-capture data, the system dynamically adapts to the operator’s intentions, allowing flexible coordination among robotic arms.

Key Features
-
Reconfigurable Control Architecture: Operators can toggle between independent or coordinated control of any number of arms—whether acting solo, cooperatively, or collectively as parts of a virtual “robotic hand.”
-
Tele-Impedance Modeling: The robots mimic both the position and impedance (stiffness and movement responsiveness) of the human operator’s arm, improving dexterity and interaction safety during complex tasks.
-
Empirical Validation: In experimental trials, eight participants controlled four 7-DoF Franka Emika Panda robots using this interface, demonstrating the framework’s intuitive user experience and real-world applicability.
Why It Matters
This study marks a significant advancement in teleoperation, especially where coordination of multiple manipulators is essential—such as in manufacturing, collaborative robotics, and remote operations in hazardous environments. By integrating natural human inputs like muscle activity and motion dynamics, the framework promises more intuitive and safer interaction than traditional joystick-based controls.
Related Work & Complementary Progress
-
Other teams at IIT (including Doganay Sirintuna and Ozdamar) are also working on adaptive collaborative robotic interfaces using Xsens motion capture. These interfaces enable real-time robot behavior adjustment based on human intent, with strong potential for healthcare, emergency response, and home assistance applications.